Por Claudio R. Parrinello | Junio 2026
En 2020, que un robot humanoide caminara sin caerse era noticia mundial. En 2026, esos mismos sistemas hacen acrobacias, manipulan objetos frágiles, trabajan en fábricas reales y cuestan menos que un auto familiar. Esta aceleración no fue accidental. Responde a un patrón identificable, medible y proyectable que Claudio R. Parrinello formalizó y que hoy se conoce como la Ley Parrinello.
¿Qué dice la Ley Parrinello?
La Ley Parrinello describe el patrón de evolución de los robots humanoides. En su formulación central, afirma que las capacidades de estos robots —movimiento, destreza, autonomía, inteligencia aplicada, naturalidad de interacción— se duplican aproximadamente cada 9 a 12 meses, mientras los costos caen entre un 35% y un 50% anual.
Pero Parrinello va más lejos que una simple curva exponencial. Su análisis mejorado establece que la evolución robótica humanoide no es uniformemente exponencial: tiene tres fases distintas con dinámicas radicalmente diferentes.
Las tres fases de la curva
Fase 1 — Arranque lento (2015–2022): El suelo duro
Durante casi siete años, el progreso fue real pero decepcionantemente lento para el gran público. Los robots podían hacer tareas puntuales en laboratorio, pero eran frágiles, lentos, costosísimos y requerían entornos controlados al milímetro.
¿Por qué tan lento? Porque los prerrequisitos no estaban listos: la IA de visión y control no tenía la potencia necesaria, la simulación física era primitiva, los actuadores (los «músculos» del robot) eran caros y pesados, y no existía aún la convergencia entre IA, robótica y computación a gran escala. Fue un período de inversión silenciosa en infraestructura. Los ciclos de mejora eran de 3 a 5 años por duplicación de capacidades relevantes.
Hito representativo: ATLAS de Boston Dynamics (2016) — impresionante en laboratorio, inviable en el mundo real.
Fase 2 — Aceleración casi exponencial (2023–2026): El despegue
Aquí es donde la Ley Parrinello se vuelve dramáticamente visible. Entre 2023 y 2026 se produjeron al menos 3 o 4 duplicaciones completas de capacidades en apenas tres años. El ciclo pasó de años a meses.
¿Qué cambió? La convergencia se activó: modelos de IA entrenados con millones de horas en simulación, datos reales de despliegues industriales retroalimentando el entrenamiento, costos de hardware cayendo por economías de escala masivas, y competencia global (EE.UU., China, Europa) acelerando la inversión simultáneamente.
El resultado fue pasar de caminar rígidamente a correr a 8+ km/h, manipular objetos frágiles con precisión milimétrica y ejecutar 100 a 300 tareas distintas de forma autónoma. Los precios cayeron de 150.000–500.000 dólares a 6.000–30.000 dólares en el mismo período.
La fórmula matemática que describe esta fase:
C(t) = C₀ × 2^(t / T) — donde T es el período de duplicación (9–12 meses, acortándose progresivamente hacia 6–9 meses al acercarse a la paridad humana)
Costo(t) ≈ Costo₀ × (0,50–0,65)^(t / 12) — es decir, entre un 35% y 50% más barato cada año
Fase 3 — Rendimientos decrecientes (2027 en adelante): La Pared Humana
Aquí está la corrección más importante que Parrinello introduce respecto a visiones más ingenuas del progreso tecnológico: el progreso no puede ser exponencial infinitamente hacia el mimetismo humano.
Cuanto más cerca se está de la apariencia y el comportamiento humano perfecto, más difícil, costoso e irrelevante se vuelve cada paso adicional. No porque la tecnología no pueda, sino porque el objetivo mismo se vuelve contraproducente. Parrinello llama a esto la Ley del Tope Humano.
El fenómeno opera en cuatro dimensiones:
El abismo del «casi pero no». Cuando el robot está al 95% de la similitud humana, las imperfecciones que antes eran invisibles se vuelven insoportables: micro-expresiones desincronizadas por 0,1 segundos, parpadeo con ritmo ligeramente incorrecto, temperatura de piel artificial bajo el tacto. El efecto psicológico es paradójico: cuanto más realista, más perturbador resulta lo que falta.
La trampa de heredar limitaciones humanas. Un robot diseñado para ser exactamente humano hereda todas las debilidades humanas: músculos que se fatigan, huesos que se fracturan, necesidad de descanso. ¿Para qué construir una máquina que carga 20 kilos cuando podría cargar 200? La mimesis humana perfecta es, paradójicamente, el peor diseño posible para casi todas las aplicaciones.
La complejidad exponencial de lo biológico. Replicar completamente la biología humana requeriría simular emociones químicas (adrenalina, serotonina, dopamina) con efectos reales sobre el comportamiento, replicar la reparación celular y el envejecimiento, y gestionar sistemas internos interdependientes. El costo energético y de mantenimiento se dispara exponencialmente al acercarse a la completitud biológica.
El problema ético y social. La sociedad necesita saber cuándo está interactuando con una máquina. Los marcos regulatorios que están emergiendo en 2026 apuntan exactamente a requerir que los robots sean identificables como tales. La humanización total es un objetivo que la sociedad activamente va a resistir.
Lo que ocurre después del tope: la ramificación
La parte más fascinante y menos discutida de la Ley Parrinello es lo que ocurre cuando la evolución choca con el Tope Humano: no se detiene, se ramifica.
La evolución deja de ser lineal (más humano = mejor) y se convierte en un árbol de especiaciones donde cada rama optimiza para un conjunto diferente de objetivos. Parrinello identifica cinco ramas principales:
Rama 1 — El Humanoide Social: Mantiene forma bípeda y proporciones humanas, pero no intenta ser indistinguible. Optimizado para interacción social legible: voz, gestos, contacto visual. Diseñado intencionalmente como «casi humano pero reconociblemente robot» para evitar el Valle Inquietante. Aplicaciones: cuidado de adultos mayores, educación, compañía terapéutica. Despliegue masivo esperado: 2027–2030, costos bajo 5.000 dólares para 2030.
Rama 2 — El Superhumano Industrial: Abandona gradualmente las restricciones antropomórficas. Puede tener más de dos brazos, articulaciones con rangos de movimiento imposibles para humanos, sensores no biológicos (infrarrojo, ultrasonido, magnético), operación continua sin descanso. Aplicaciones: manufactura avanzada, construcción, minería, logística de alta velocidad. Modelos iniciales ya en despliegue en 2026.
Rama 3 — El Enjambre Distribuido: Reemplaza la inteligencia individual centralizada por coordinación masiva de unidades simples. Cientos o miles de unidades pequeñas que comparten conocimiento en tiempo real. Alta redundancia: la pérdida de unidades no afecta la misión. Aplicaciones: búsqueda y rescate, agricultura de precisión, mantenimiento de infraestructura. Primeros despliegues funcionales esperados: 2028–2032.
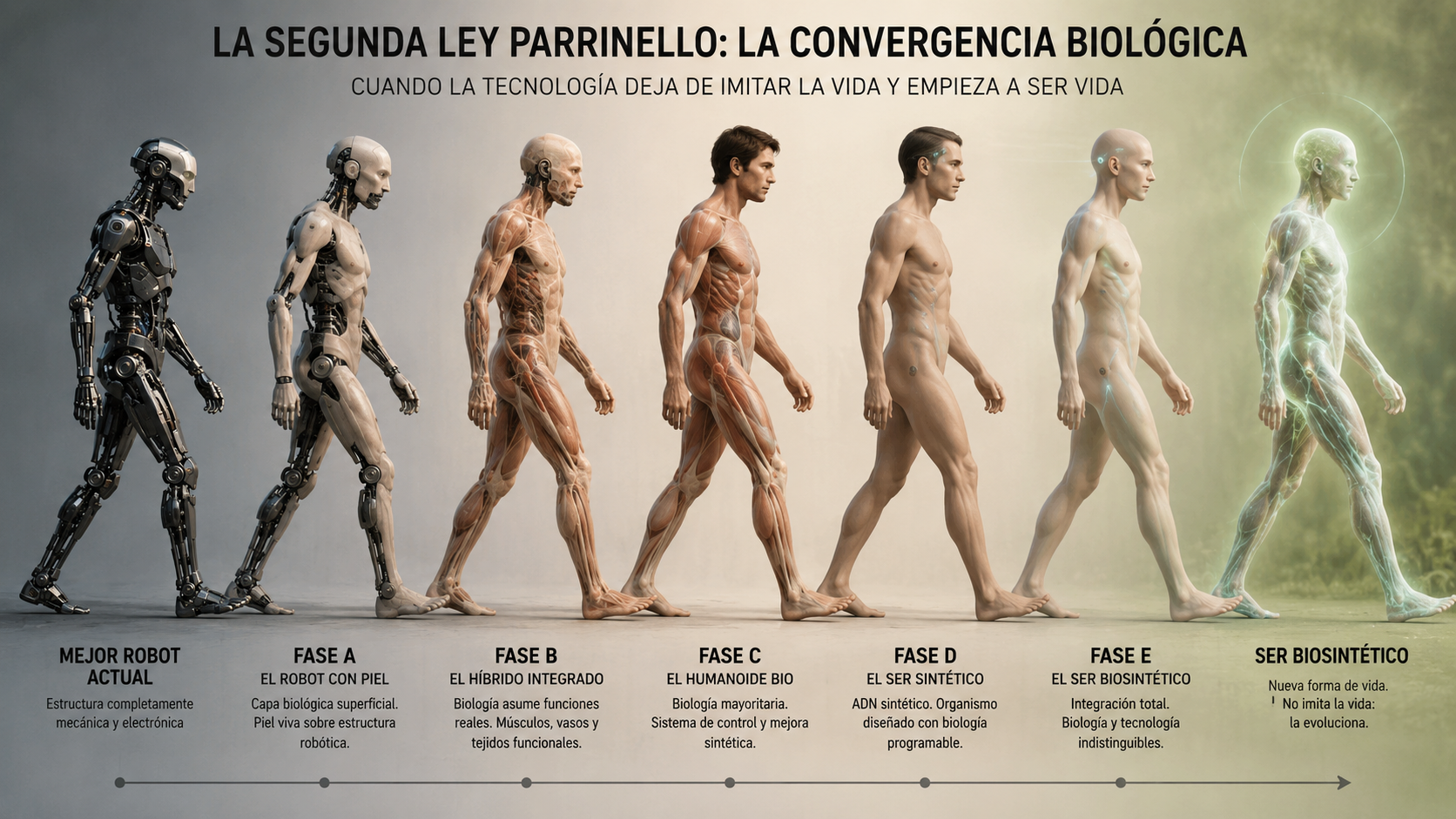
Rama 4 — El Híbrido Biotech-Nano: Difumina la frontera entre lo artificial y lo orgánico. Piel viva cultivada sobre estructura robótica, integración con sistemas biológicos mediante interfaces cerebro-computadora (BCI). Esta es la única rama donde profundizar en la similitud biológica tiene sentido, porque el objetivo no es mimetismo sino simbiosis. Despliegues parciales esperados: 2030–2035.
Rama 5 — El Robot Especializado No-Antropomórfico: Abandona toda pretensión de forma humana y optimiza completamente para la tarea. El diseño sigue exclusivamente a la función. Esta rama ya existe y es la más madura; su conexión con la IA humanoide de vanguardia la llevará a un nuevo nivel de autonomía. Explosión de capacidades: 2026–2030.
La Ley Parrinello en tres frases
En su conclusión, Parrinello sintetiza su ley con elegante precisión:
Primero arranca lento, construyendo las bases que nadie ve.
Luego explota casi exponencialmente, duplicando capacidades cada 9 a 12 meses mientras los costos colapsan, hasta rozar la paridad con el humano.
Después choca contra el Tope Humano, donde imitar al ser humano perfecto se vuelve exponencialmente más difícil y menos útil, y la evolución se ramifica hacia formas superhumanas y especializadas que ya no imitan: superan.
La pregunta, concluye Parrinello, no es si los robots humanoides van a transformar el mundo —ya lo están haciendo. La pregunta es si vamos a entender la curva lo suficientemente bien como para estar del lado correcto cuando se doble.
Análisis Mejorado — Junio 2026 | Categoría: Tecnología, Robótica, Futuro
























 AI1 año ago
AI1 año ago
 Nano1 año ago
Nano1 año ago
 AI6 meses ago
AI6 meses ago
 AI1 año ago
AI1 año ago